Research & Publications
Research Framework
My passion extends to diverse projects in data analytics, deep learning, and system dynamics and control. I leverage these projects to enrich my knowledge base, fostering a well-rounded approach. This dynamic involvement allows me to contribute meaningfully to the intersection of control systems and emerging technologies. With a commitment to continuous learning, I am excited to explore new possibilities and make impactful strides in this ever-evolving field.
Types of research
Deep Learning & Training Algorithms Research
Research specializing in developing training methodologies for coupled state and non-linear parameter estimation
Physics-Enhanced Hybrid Deep learning modeling & simulation
Research specializing in physics-informed deep learning models to accurately model non-linear dynamics in heavily noisy systems
Control systems & Optimization
Developing process optimization strategies and energy intensification with novel equipment design and implementation of predictive control
Hybrid Deep Learning Modeling & Training Algorithms
Overview
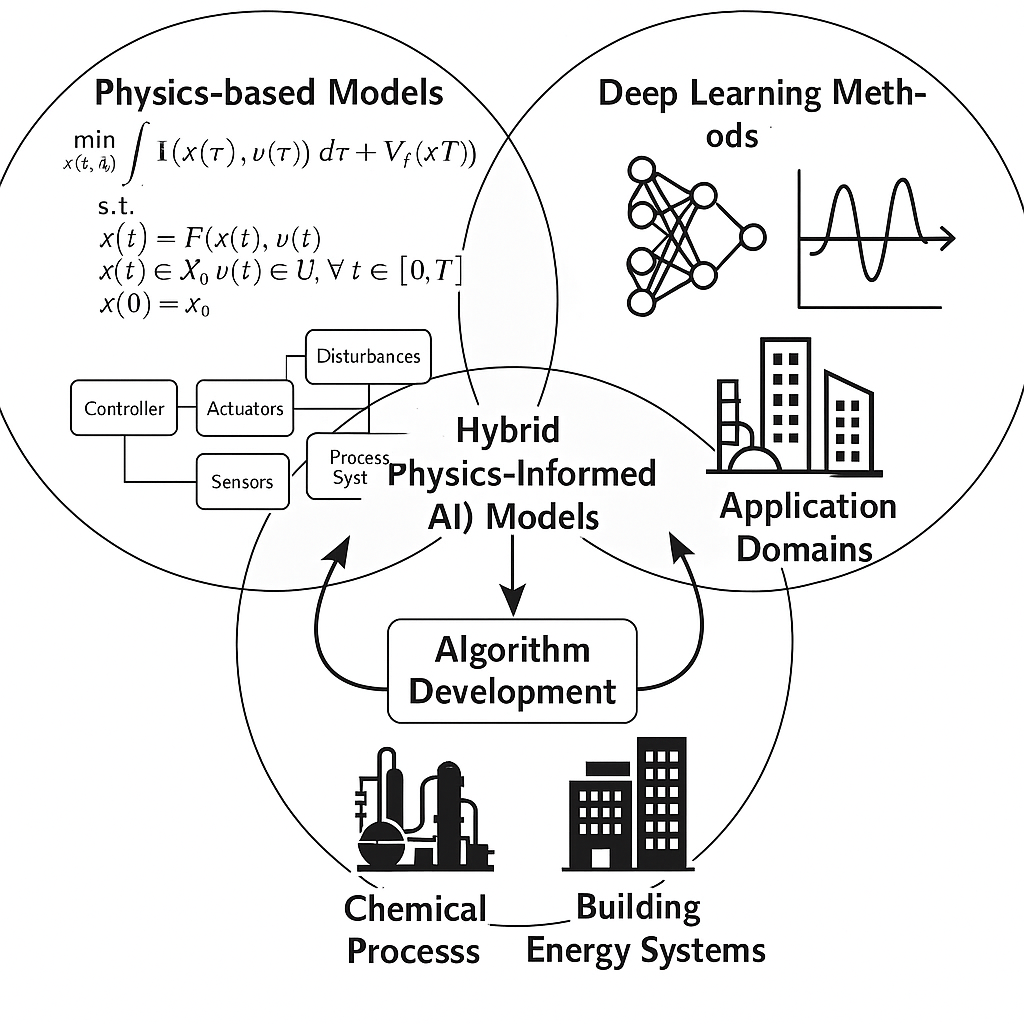
This research focuses on developing novel training methodologies for hybrid physics-informed neural networks, specifically addressing the challenges of parameter estimation in systems with time-varying disturbances. The work combines first-principles physics-based models with data-driven neural networks to create robust, control-oriented modeling frameworks for complex dynamical systems.
Hybrid Modeling Framework: Physics-Informed Deep learning
The core innovation lies in the development of hybrid models that seamlessly integrate parameterized low-order physics-based models with feedforward neural networks. These hybrid architectures address the fundamental challenge of coupled state/disturbance parameter estimation in systems where unmeasured time-varying disturbances significantly impact system behavior.
Mathematical Foundation
The hybrid model formulation combines a physics-based resistance-capacitance (RC) network with a neural network disturbance predictor. The governing differential equation for the thermal system is expressed as:
C dT⁄dt = (Text – Tint)⁄R + Qhvac + Qdist(t)
where C represents thermal capacitance, R denotes thermal resistance, Tint and Text are indoor and outdoor temperatures respectively, Qhvac is the HVAC heat input, and
Qdist(t) represents time-varying heat disturbances predicted by the neural network component.
The neural network component is formulated as:
Qdist(t) = fNN(x(t), θNN)
where x(t) represents the input features and θNN are the neural network parameters to be optimized simultaneously with the physics-based parameters.
Hybrid Architecture Benefits
The hybrid approach provides several advantages over purely data-driven or purely physics-based models:
- Physical Consistency: Physics-based components ensure solutions obey fundamental conservation laws
- Data Efficiency: Requires significantly less training data compared to pure neural networks
- Interpretability: Physics parameters retain physical meaning and can be used for system analysis
- Robustness: Combined approach handles both modeled and unmodeled dynamics effectively
Loss Function Formulation
The physics-informed loss function incorporates both data-driven and physics-based constraints:
Ltotal = Ldata + λphysicsLphysics + λbcLboundary
The physics residual loss is formulated as:
Lphysics = (1/N) ∑i=1N || F[uNN(xi; θ)] – f(xi) ||2
where F[·] represents the differential operator, uNN is the neural network solution, and f(xi) are the source terms. boundary condition loss ensures satisfaction of physical constraints:
Lboundary = (1/Nbc) ∑j=1Nbc || B[uNN(xjbc; θ)] – g(xjbc) ||2
where B[·] represents the boundary operator and g specifies the boundary conditions.
Applications to Building Thermal Systems
Control-Oriented Modeling
The research specifically targets building thermal modeling for model predictive control (MPC) applications. Buildings present unique challenges due to:
- Unmeasured disturbances from occupancy, solar radiation, and electrical devices
- Time-varying parameters due to changing weather conditions
- Limited training data to minimize comfort violations during system identification
Parameter Estimation Methods
The research compares multiple parameter estimation approaches:
- Nonlinear Least Squares (NLS): Minimizes prediction error subject to system dynamics constraints
- Maximum Likelihood Estimation (MLE): Accounts for measurement noise characteristics
- Unscented Kalman Filter (UKF): Provides online parameter and state estimation capability
The hybrid three-step methodology demonstrates superior performance across all these estimation frameworks.
Advanced Training Techniques and Optimization
Multi-Objective Optimization
The training process involves balancing multiple competing objectives. The augmented Lagrangian formulation helps address the challenge of loss term weighting:
Laugmented = Ldata + ∑i λi gi(θ) + ∑i ½ ρi [gi(θ)]2
where gi(θ) represent physics constraints, λi are Lagrange multipliers, and ρi are penalty parameters, all treated as learnable parameters.
Spectral Bias Mitigation
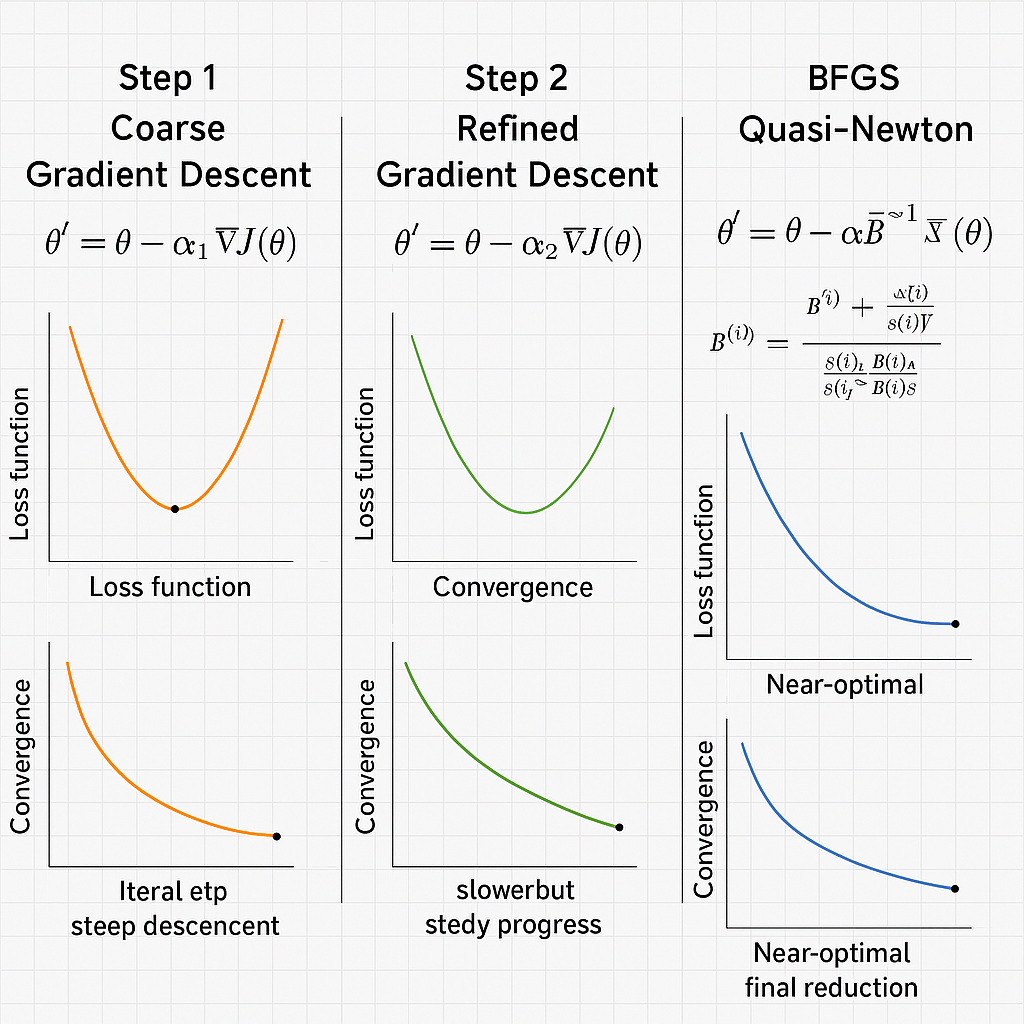
Physics-informed neural networks often suffer from spectral bias, struggling to capture high-frequency components. The three-step methodology addresses this through:
- Multi-scale sampling: Different gradient descent phases use different spatial/temporal sampling strategies
- Adaptive learning rates: BFGS provides natural scaling based on Hessian approximation
- Progressive refinement: Initial phases capture low-frequency components, BFGS refines high-frequency details
Links to papers: [Books, Conferences, papers]
Control Systems & Optimiztion
Overview
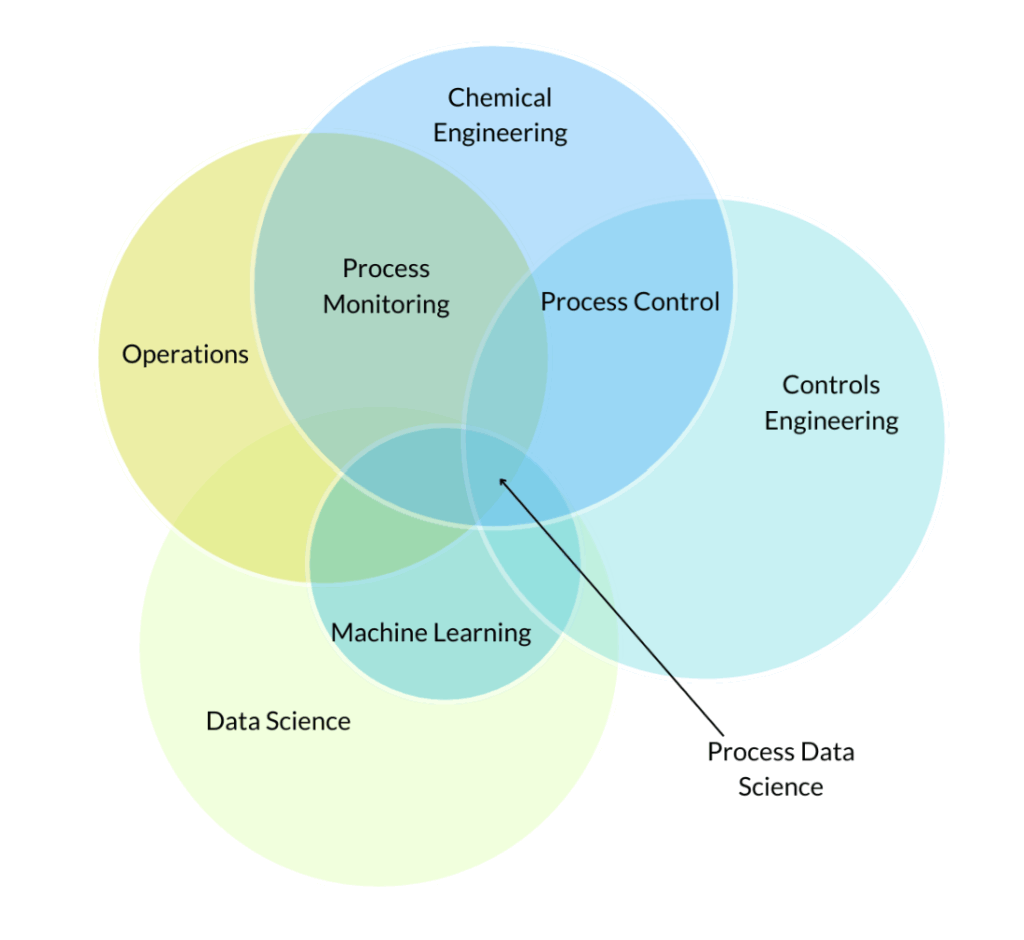
Process control in chemical engineering is a systematic approach to managing and regulating chemical processes to ensure they operate safely, efficiently, and within desired parameters. It involves the continuous monitoring and adjustment of key process variables such as temperature, pressure, flow rate, concentration, and pH to maintain optimal operating conditions. The primary objective is to maintain these variables at their desired setpoints despite external disturbances and internal fluctuations, ensuring consistent product quality, maximizing efficiency, and maintaining safety standards.
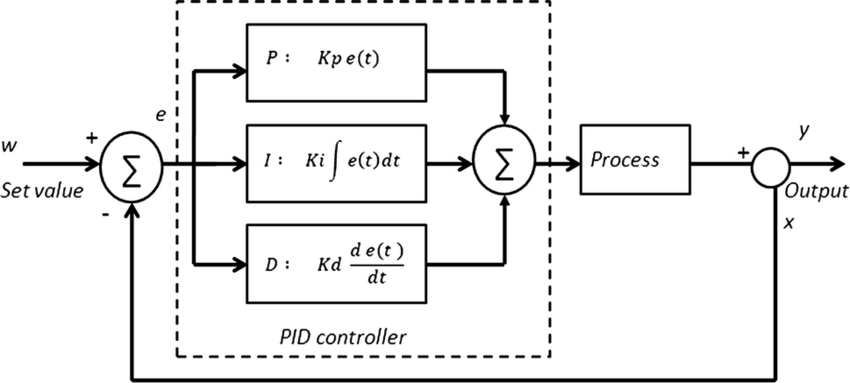
The foundation of process control lies in feedback control systems, where sensors continuously measure process variables, controllers compare these measurements to predetermined setpoints, and actuators make corrective adjustments when deviations occur. The most commonly used controller in chemical engineering is the Proportional-Integral-Derivative (PID) controller, which combines three control actions: proportional control provides immediate response to errors, integral control eliminates steady-state errors, and derivative control improves system stability by responding to the rate of change. This creates a closed-loop control system that automatically maintains process conditions within specified ranges, enabling automated operation and reducing the need for manual intervention.
Controller Design & Process Modeling
Process modeling creates mathematical representations of chemical processes using differential equations that describe dynamic behavior of variables like temperature, pressure, and concentration. These models are essential for designing and tuning control systems, enabling controllers to predict process responses and optimize performance. Models bridge process understanding with effective control strategy development.
Proportional-Integral-Derivative Controller
A PID controller maintains a process variable—like temperature or pressure—at a desired setpoint by computing the difference between the measured value and target. It outputs a corrective signal composed of three elements: proportional (instant reaction to error), integral (eliminates past errors), and derivative (anticipates future trends), ensuring fast, stable, and accurate control